Page 137 of 244
 135
Rijden
6Het systeem werkt in de volgende
situaties mogelijk minder goed of
helemaal niet:
–
wegmarkeringen afwezig, versleten,
niet zichtbaar (door sneeuw of modder), of
meerdere wegmarker")
135
Rijden
6Het systeem werkt in de volgende
situaties mogelijk minder goed of
helemaal niet:
–
wegmarkeringen afwezig, versleten,
niet zichtbaar (door sneeuw of modder), of
meerdere wegmarkeringen (weggedeelte met
werkzaamheden enz.);
–
geringe afstand tot de voorligger (geen
detectie van wegmarkeringen);
–
smalle of bochtige weg.
Parkeerhulp
Raadpleeg de algemene adviezen over
het gebruik van de rij- en
parkeerhulpsystemen voor meer informatie.
Het systeem detecteert de nabijheid van
obstakels (bijv. voetganger, voertuig, boom, hek)
met de hulp van de sensoren in de bumper en
geeft deze aan.
Parkeerhulp achter
► Schakel de achteruitversnelling in om het
systeem te activeren (bevestigd door een
geluidssignaal).
Het systeem wordt uitgeschakeld wanneer uit de
achteruitversnelling wordt geschakeld.
Geluidssignalen
Het systeem geeft de aanwezigheid van
obstakels binnen het detectiegebied van de
sensor aan.
De bestuurder wordt via een onderbroken
geluidssignaal gewaarschuwd bij het naderen
van obstakels. De frequentie van het
geluidssignaal neemt toe naarmate de auto het
obstakel nadert.
Zodra de afstand tussen de auto en het obstakel
kleiner dan ongeveer dertig centimeter is, klinkt
het geluidssignaal ononderbroken.
U hoort via de luidspreker (rechts of links)
aan welke zijde van de auto het obstakel zich
bevindt.
Het geluidssignaal instellenAfhankelijk van de uitvoering: als u bij CITROËN Connect Nav op
deze toets drukt, wordt het venster geopend
waarop u het volume van het geluidssignaal
kunt instellen.
Grafische weergave
Dit is een aanvulling op het geluidssignaal,
waarbij geen rekening worden gehouden met
de rijrichting van de auto. Dit systeem geeft
de afstand tussen het obstakel en de auto met
balken op het scherm aan (wit: veraf, oranje:
dichtbij en rood: zeer dichtbij).
Als de auto het obstakel zeer dicht is genaderd,
verschijnt het symbool "Gevaar" op het scherm.
Parkeerhulp vóór
De parkeerhulp vóór is een aanvulling op de
parkeerhulp achter en wordt geactiveerd zodra
er bij een rijsnelheid van maximaal 10
km/h vóór
de auto een obstakel wordt gedetecteerd.
De werking van de parkeerhulp vóór wordt
onderbroken als de auto langer dan drie
Page 138 of 244
 136
Rijden
seconden stilstaat terwijl een versnelling vooruit
is ingeschakeld, als er geen obstakel meer wordt
gedetecteerd of als de auto harder dan 10 km/h
rijdt.
Het geluid uit de luidspreker (v")
136
Rijden
seconden stilstaat terwijl een versnelling vooruit
is ingeschakeld, als er geen obstakel meer wordt
gedetecteerd of als de auto harder dan 10 km/h
rijdt.
Het geluid uit de luidspreker (voor of
achter) geeft de positie van het obstakel
ten opzichte van de auto aan (voor of achter).
Parkeerhulp zijkant
Met vier extra sensoren aan de zijkant van de
bumpers registreert het systeem de positie van
obstakels tijdens het manoeuvreren en geeft ze
weer als de obstakels zich aan de zijkant van de
auto bevinden.
Alleen vaste obstakels worden juist weergegeven. Bewegende obstakels die
aan het begin van de manoeuvre worden
gedetecteerd, kunnen ten onrechte worden
weergegeven, terwijl bewegende obstakels
langs de auto niet worden weergegeven als
ze in een eerder stadium niet zijn
geregistreerd.
Voorwerpen die tijdens de manoeuvre
worden geregistreerd, worden uit het
geheugen gewist als het contact wordt
afgezet.
Uitschakelen/inschakelen
De instellingen kunnen worden gewijzigd
via het menu Rijverlichting/Auto van het
touchscreen.
De status van het systeem wordt opgeslagen bij
het uitzetten van het contact.
Het parkeerhulpsysteem achter wordt
automatisch uitgeschakeld wanneer er
een aanhanger of fietsendrager wordt
aangekoppeld aan een trekhaak die volgens
de voorschriften van de fabrikant is
gemonteerd.
In dat geval wordt de omtrek van een
aanhanger weergeven aan de achterzijde van
het beeld van de auto.
De parkeerhulp wordt uitgeschakeld wanneer de
functie Park Assist bezig is om de beschikbare
ruimte van een parkeerplaats te meten.
Zie het betreffende hoofdstuk voor meer
informatie over de functie Park Assist.
Wanneer de auto wordt gestart, zijn de
grafische weergave en de
geluidssignalen van de parkeerhulpsystemen
pas beschikbaar nadat het touchscreen is
opgestart.
Werkingslimieten
Bij zware belading van de bagageruimte kan
de hoek van de auto de afstandsmetingen
verstoren.
Storing
Als er een storing optreedt wanneer u de achteruitversnelling inschakelt, dan gaat
dit waarschuwingslampje op het
instrumentenpaneel branden, in combinatie met
een melding en een geluidssignaal (kort
piepsignaal).
Laat het systeem controleren door het
CITROËN-netwerk of een gekwalificeerde
werkplaats.
Top Rear Vision - Vision 360
Lees voor meer informatie de algemene
adviezen over het gebruik van de
rij- en parkeerhulpsystemen.
Page 139 of 244
 137
Rijden
6Bij draaiende motor kunnen met deze systemen
weergaven van de directe omgeving van de auto
worden weergegeven op het touchscreen met
behulp van één camera bij Top Rear Vision en
twee")
137
Rijden
6Bij draaiende motor kunnen met deze systemen
weergaven van de directe omgeving van de auto
worden weergegeven op het touchscreen met
behulp van één camera bij Top Rear Vision en
twee camera’s bij Vision 360.
Het scherm is in twee delen opgedeeld, met
in het ene deel de omgeving zoals die door de
camera('s) wordt geregistreerd en in het andere
deel het beeld van bovenaf van de directe
omgeving van de auto.
De informatie van de parkeerhulpsensoren vult
het beeld van bovenaf aan.
Er kunnen diverse weergaven worden
weergegeven:
– Standaardweergave.
–
180° weergave.
–
Ingezoomde weergave.
Standaard is de stand
AUTO geactiveerd. In deze stand kiest het systeem voor de beste
weergave (standaard of ingezoomd).
U kunt tijdens het manoeuvreren op elk gewenst
moment de weergave wijzigen.
►
Druk op de toets in de hoek linksonder van
het touchscreen.
►
Selecteer een type weergave:
•
"Standaardweergave
".
• "180° view".
• "Ingezoomde weergave".
• "AUTO view".
De weergave wordt onmiddellijk aangepast aan
het geselecteerde type.
De systeemstatus wordt niet opgeslagen bij het
afzetten van het contact.
Werkingsprincipe
Dit systeem registreert tijdens het manoeuvreren
bij lage snelheid met één of twee camera's de
omgeving van de auto.
Van boven de auto wordt er, in realtime en
terwijl de manoeuvre wordt uitgevoerd, een
beeld van de directe omgeving gereconstrueerd
(weergegeven tussen de haakjes). Deze weergave maakt het recht inparkeren
gemakkelijker en biedt de mogelijkheid om de
obstakels in de buurt van de auto te zien. Dit
beeld verdwijnt automatisch als de auto langere
tijd stilstaat.
Bij de Vision 360 wordt het beeld samengesteld
door beide camera's, zowel bij het vooruitrijden
als bij het achteruitrijden.
Wanneer de functie is geactiveerd, kan het
zijn dat het beeld van bovenaf niet wordt
weergegeven. Als het systeem wordt geactiveerd
wanneer de auto al is verplaatst, kan het beeld
van bovenaf volledig worden weergegeven.
Top Rear Vision
Beeld achterzijde
U activeert de camera bij de
kentekenplaatverlichting door de
achteruitversnelling in te schakelen en niet
harder dan 10
km/h te rijden.
De functie wordt uitgeschakeld:
Page 140 of 244
 138
Rijden
– Automatisch, bij snelheden hoger dan
ongeveer 20 km/h,
–
Automatisch, als de bagageruimte wordt
geopend.
–
Als er uit de achteruitversnelling wordt
geschakeld.
–
Als")
138
Rijden
– Automatisch, bij snelheden hoger dan
ongeveer 20 km/h,
–
Automatisch, als de bagageruimte wordt
geopend.
–
Als er uit de achteruitversnelling wordt
geschakeld.
–
Als op de witte pijl linksboven in de hoek van
het touchscreen wordt gedrukt.
Stand AUTO
Deze stand is standaard geactiveerd.
Wanneer een obstakel zich ter hoogte van de
rode lijn bevindt (minder dan 30
cm van de auto)
wordt dankzij de sensoren in de achterbumper
automatisch overgeschakeld van de weergave
van de omgeving achter de auto (standaard)
naar de weergave van het beeld van bovenaf
(ingezoomd) van de auto.
Standaardweergave
Het gebied achter de auto wordt weergegeven
op het scherm.
De blauwe lijnen ( 1) geven de breedte van de
auto weer met uitgeklapte buitenspiegels; ze
verplaatsen zich afhankelijk van de stand van
het stuurwiel.
De rode lijn 2 geeft een afstand van 30
cm vanaf
de achterbumper weer; de twee blauwe lijnen 3
en 4 een afstand van respectievelijk 1 m en 2 m.
Deze weergave is beschikbaar in de stand
AUTO of door deze te selecteren in het menu
voor het veranderen van de weergave.
Ingezoomde weergave
De camera registreert de omgeving tijdens het
manoeuvreren om een samengesteld beeld
van bovenaf van de achterzijde van de auto en
van zijn nabije omgeving te creëren zodat de
obstakels rondom de auto goed zichtbaar zijn.
Deze weergave is beschikbaar in de stand
AUTO of door deze te selecteren in het menu
voor het veranderen van de weergave.
De obstakels kunnen verder weg lijken
dan ze in werkelijkheid zijn.
Tijdens het manoeuvreren moet u de
zijkanten van de auto via de buitenspiegels in
de gaten houden.
De parkeersensoren geven ook extra
informatie over het gebied rondom de auto.
180°-weergave
Wanneer u achteruitrijdend een parkeerplaats
verlaat, kunt u dankzij de 180°-weergave
voertuigen, voetgangers of fietsers zien
aankomen.
Wij raden u aan om deze weergave niet tijdens
de gehele manoeuvre te gebruiken.
De weergave heeft drie zones: links A, midden B
en rechts C.
Deze weergave is alleen beschikbaar door deze
te selecteren in het menu voor het veranderen
van de weergave.
Vision 360
De auto is voorzien van een in de grille
geplaatste camera vóór en een camera achter
Page 141 of 244
 139
Rijden
6180°-weergave
Wanneer u achteruitrijdend een parkeerplaats
verlaat, kunt u dankzij de 180°-weergave
voertuigen, voetgangers of fietsers zien
aankomen.
Wij raden u aan om deze weerg")
139
Rijden
6180°-weergave
Wanneer u achteruitrijdend een parkeerplaats
verlaat, kunt u dankzij de 180°-weergave
voertuigen, voetgangers of fietsers zien
aankomen.
Wij raden u aan om deze weergave niet tijdens
de gehele manoeuvre te gebruiken.
De weergave heeft drie zones: links A, midden B
en rechts C.
Deze weergave is alleen beschikbaar door deze
te selecteren in het menu voor het veranderen
van de weergave.
Vision 360
De auto is voorzien van een in de grille
geplaatste camera vóór en een camera achter die in de buurt van de kentekenplaatverlichting
is geplaatst.
Dankzij deze camera's kan het systeem de
nabije omgeving van de auto weergeven op
het touchscreen, waarbij u kunt kiezen uit een
weergave van de omgeving achter de auto
(camera achter), als de achteruitversnelling
is ingeschakeld, en een weergave van de
omgeving vóór de auto (camera vóór), als de
versnellingsbak in de neutraalstand staat of een
vooruitversnelling is ingeschakeld.
Beeld van de camera achter
Het systeem wordt automatisch geactiveerd
wanneer de achteruitversnelling wordt
ingeschakeld.
De functie wordt uitgeschakeld:
–
Automatisch, bij snelheden hoger dan
ongeveer 20
km/h,
–
Als uit de achteruitversnelling wordt
geschakeld (het beeld aan de achterzijde wordt
dan na 7 seconden vervangen door het beeld
aan de voorzijde).
–
Als op de witte pijl linksboven in de hoek van
het touchscreen wordt gedrukt.
Als een aanhanger is aangekoppeld of een fietsendrager is gemonteerd op de
trekhaak, wordt het gebied achter de auto op
het beeld van bovenaf van de auto zwart
weergegeven.
De beelden van de omgeving worden dan
uitsluitend samengesteld met behulp van de
camera vóór.
De verschillende weergaves van de camera
achter komen overeen met de weergaves die
beschreven zijn in het gedeelte over de functie
Top Rear Vision.
Zie het betreffende hoofdstuk voor meer
informatie over de functie Top Rear Vision.
Beeld van de camera's voor en achter
Page 142 of 244
 140
Rijden
Bij draaiende motor en een rijsnelheid van
maximaal 20 km/h kunt u deze functie
activeren via het menu Rijverlichting/Auto van
het touchscreen:
►
Selecteer \"
Parkeerhulp\"")
140
Rijden
Bij draaiende motor en een rijsnelheid van
maximaal 20 km/h kunt u deze functie
activeren via het menu Rijverlichting/Auto van
het touchscreen:
►
Selecteer "
Parkeerhulp".
De stand AUTO wordt standaard gebruikt, met
een weergave van de omgeving vóór de auto als
de versnellingsbak in de neutraalstand staat of
een vooruitversnelling is ingeschakeld, en een
weergave van de omgeving achter de auto als
de achteruitversnelling is ingeschakeld.
De functie wordt uitgeschakeld:
–
Automatisch, als de rijsnelheid hoger wordt
dan ongeveer 30
km/h (het beeld verdwijnt
tijdelijk vanaf een snelheid van 20
km/h).
–
Als op de witte pijl linksboven in de hoek van
het touchscreen wordt gedrukt.
Stand AUTO
Deze stand is standaard geactiveerd.
Wanneer u een obstakel nadert, wordt dankzij
de sensoren in de voorbumper automatisch
overgeschakeld van de weergave van de
omgeving vóór de auto (standaard) naar de
weergave van het beeld van bovenaf van de
auto (zoom).
Standaardweergave
Het gebied vóór de auto wordt weergegeven op
het scherm.
De oranje lijnen 1 geven de breedte van de
auto weer met uitgeklapte buitenspiegels; ze
verplaatsen zich afhankelijk van de stand van
het stuurwiel.
De rode lijn 2 geeft een afstand van 30 cm vanaf
de voorbumper weer; de twee oranje lijnen 3 en
4 een afstand van respectievelijk 1 en 2 meter.
Deze weergave is beschikbaar in de stand
AUTO of door deze te selecteren in het menu
voor het veranderen van de weergave.
Ingezoomde weergave
De camera registreert de omgeving tijdens het
manoeuvreren om een samengesteld beeld van
bovenaf van de voorzijde van de auto en van zijn
nabije omgeving te creëren zodat de obstakels
rondom de auto goed zichtbaar zijn.
Deze weergave is beschikbaar in de stand
AUTO of door deze te selecteren in het menu
voor het veranderen van de weergave.
De obstakels kunnen verder weg lijken
dan ze in werkelijkheid zijn.
Tijdens het manoeuvreren moet u met de
buitenspiegels de zijkanten van de auto in de
gaten houden.
De parkeerhulp geeft bovendien extra
informatie over de omgeving van de auto.
180°-weergave
Wanneer u vooruitrijdend een parkeerplaats
verlaat, kunt u dankzij de 180°-weergave
voertuigen, voetgangers of fietsers zien
aankomen.
Wij raden u aan om deze weergave niet tijdens
de gehele manoeuvre te gebruiken.
De weergave heeft drie zones: links A, centraal
B en rechts C.
Deze weergave is alleen beschikbaar door deze
te selecteren in het menu voor het veranderen
van de weergave.
Page 143 of 244
 141
Rijden
6180°-weergave
Wanneer u vooruitrijdend een parkeerplaats
verlaat, kunt u dankzij de 180°-weergave
voertuigen, voetgangers of fietsers zien
aankomen.
Wij raden u aan om deze weergav")
141
Rijden
6180°-weergave
Wanneer u vooruitrijdend een parkeerplaats
verlaat, kunt u dankzij de 180°-weergave
voertuigen, voetgangers of fietsers zien
aankomen.
Wij raden u aan om deze weergave niet tijdens
de gehele manoeuvre te gebruiken.
De weergave heeft drie zones: links A, centraal
B en rechts C.
Deze weergave is alleen beschikbaar door deze
te selecteren in het menu voor het veranderen
van de weergave.
Park Assist
Lees voor meer informatie de algemene
adviezen over het gebruik van de rij- en
parkeerhulpsystemen .
Dit systeem biedt actieve parkeerhulp: het
detecteert een parkeerplek en stuurt vervolgens
in de betreffende richting om op deze plek te
parkeren, terwijl de bestuurder de rijrichting
bepaalt, schakelt, accelereert en remt.
Het systeem zorgt dat Top Rear Vision of Vision
360 automatisch wordt weergegeven en dat
de parkeerhulp wordt ingeschakeld zodat de
bestuurder de manoeuvre in de gaten kan
houden.
Het systeem meet beschikbare parkeerplekken
en berekent de afstand tot obstakels met
behulp van ultrasone sensoren in de voor- en
achterbumpers van de auto.
Het systeem biedt ondersteuning bij de volgende
manoeuvres:
A. Fileparkeren - inparkeren
B. Fileparkeren - uitparkeren
C. Parkeervakken - inparkeren
Werking
► Verminder de snelheid van de auto tot
30
km/h of lager als u een parkeerplek nadert.
Inschakelen van de functie
De functie kan in het menu Auto/
Rijverlichting van het touchscreen
worden ingeschakeld.
Selecteer "Park Assist".
Wanneer de functie wordt ingeschakeld,
wordt het Dodehoekbewaking-systeem
uitgeschakeld.
Tot de start van de parkeermanoeuvre of de manoeuvre om de parkeerplek te
verlaten kunt u op elk gewenst moment op de
pijl in de linkerbovenhoek van de
weergegeven pagina drukken om de functie
uit te schakelen.
Page 144 of 244
 142
Rijden
Selecteren van het type manoeuvre
Er wordt een selectiepagina voor de manoeuvre
op het touchscreen weergegeven: standaard
is dit de pagina \"Inparkeren\" als de auto na het
aanz")
142
Rijden
Selecteren van het type manoeuvre
Er wordt een selectiepagina voor de manoeuvre
op het touchscreen weergegeven: standaard
is dit de pagina "Inparkeren" als de auto na het
aanzetten van het contact heeft gereden, zo niet
dan wordt de pagina "Uitparkeren" weergegeven.
►
Selecteer het type en de zijde van de
manoeuvre om het zoeken naar een parkeerplek
in te schakelen.
De geselecteerde manoeuvre kan op elk
gewenst moment worden gewijzigd, ook
wanneer er naar een beschikbare parkeerplek
wordt gezocht.
Dit lampje gaat branden om de selectie te
bevestigen.
Zoeken naar een parkeerplek
► Zorg dat u tijdens het rijden een afstand
van 0,50 tot 1,50 meter tussen de geparkeerde
auto's en uw auto aanhoudt en rijd hierbij
niet harder dan 30 km/h tot het systeem een
beschikbare parkeerplek vindt.
Het zoeken naar een parkeerplek wordt gestopt
als de afstand tussen de geparkeerde auto's
en uw auto kleiner of groter is. De functie wordt
automatisch uitgeschakeld vanaf een rijsnelheid
van 50
km/h.
Voor "fileparkeren" moet de
parkeerruimte minimaal gelijk zijn aan de
lengte van uw auto plus 0,60 m.
Voor "haaks parkeren" moet de breedte van
de parkeerruimte minimaal gelijk zijn aan de
breedte van uw auto plus 0,70 m.
Als de functie Park Assist via het menu Rijden / Auto van het het touchscreen is
uitgeschakeld, wordt deze automatisch
ingeschakeld zodra het systeem wordt
geactiveerd.
Wanneer het systeem een beschikbare
parkeerplek vindt, wordt er “ OK“ op de
parkeerweergave getoond in combinatie met een
geluidssignaal.
Voorbereiden op de manoeuvre
► Rijd heel langzaam totdat het verzoek
wordt weergegeven om de auto tot stilstand
te brengen: "
Stop de auto" wordt samen met
"STOP" en een geluidssignaal weergegeven.
Als de auto is gestopt, wordt er een
instructiepagina op het scherm weergegeven.
►
V
olg de instructies om de manoeuvre voor te
bereiden.
De start van de manoeuvre wordt aangegeven
met de melding " Manoeuvre wordt uitgevoerd "
in combinatie met een geluidssignaal.
Achteruitrijden wordt aangeduid door deze
melding: " Stuurwiel loslaten, achteruitrijden ".
De functie Top Rear Vision of Vision 360 en de
parkeerhulp worden automatisch ingeschakeld
zodat u de directe omgeving van de auto tijdens
de manoeuvre in de gaten kunt houden.
Tijdens de manoeuvre
Het systeem neemt de besturing van de auto
over. Het geeft instructies over de richting bij
het manoeuvreren als de auto parallel wordt
in- en uitgeparkeerd, en bij het parkeren in een
parkeervak.
Deze instructies worden weergegeven als een
symbool in combinatie met een melding:
 1
1 2
2 3
3 4
4 5
5 6
6 7
7 8
8 9
9 10
10 11
11 12
12 13
13 14
14 15
15 16
16 17
17 18
18 19
19 20
20 21
21 22
22 23
23 24
24 25
25 26
26 27
27 28
28 29
29 30
30 31
31 32
32 33
33 34
34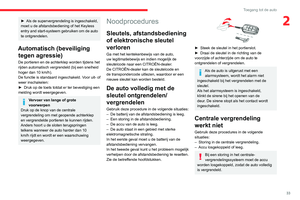 35
35 36
36 37
37 38
38 39
39 40
40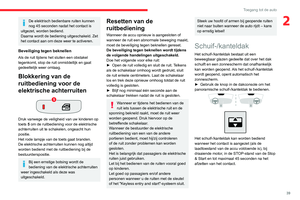 41
41 42
42 43
43 44
44 45
45 46
46 47
47 48
48 49
49 50
50 51
51 52
52 53
53 54
54 55
55 56
56 57
57 58
58 59
59 60
60 61
61 62
62 63
63 64
64 65
65 66
66 67
67 68
68 69
69 70
70 71
71 72
72 73
73 74
74 75
75 76
76 77
77 78
78 79
79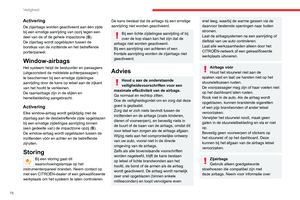 80
80 81
81 82
82 83
83 84
84 85
85 86
86 87
87 88
88 89
89 90
90 91
91 92
92 93
93 94
94 95
95 96
96 97
97 98
98 99
99 100
100 101
101 102
102 103
103 104
104 105
105 106
106 107
107 108
108 109
109 110
110 111
111 112
112 113
113 114
114 115
115 116
116 117
117 118
118 119
119 120
120 121
121 122
122 123
123 124
124 125
125 126
126 127
127 128
128 129
129 130
130 131
131 132
132 133
133 134
134 135
135 136
136 137
137 138
138 139
139 140
140 141
141 142
142 143
143 144
144 145
145 146
146 147
147 148
148 149
149 150
150 151
151 152
152 153
153 154
154 155
155 156
156 157
157 158
158 159
159 160
160 161
161 162
162 163
163 164
164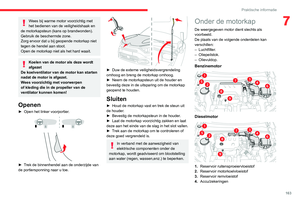 165
165 166
166 167
167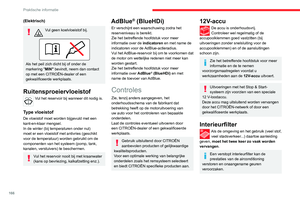 168
168 169
169 170
170 171
171 172
172 173
173 174
174 175
175 176
176 177
177 178
178 179
179 180
180 181
181 182
182 183
183 184
184 185
185 186
186 187
187 188
188 189
189 190
190 191
191 192
192 193
193 194
194 195
195 196
196 197
197 198
198 199
199 200
200 201
201 202
202 203
203 204
204 205
205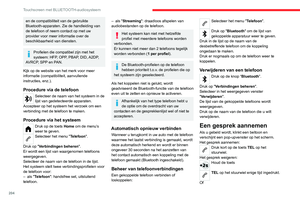 206
206 207
207 208
208 209
209 210
210 211
211 212
212 213
213 214
214 215
215 216
216 217
217 218
218 219
219 220
220 221
221 222
222 223
223 224
224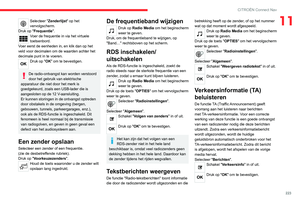 225
225 226
226 227
227 228
228 229
229 230
230 231
231 232
232 233
233 234
234 235
235 236
236 237
237 238
238 239
239 240
240 241
241 242
242 243
243