2019 CITROEN BERLINGO VAN display
[x] Cancel search: displayPage 153 of 320
 151
From the Speed Limit recommendation
and recognition system
F The suggested speed is displayed in the instrument panel.
F
M
ake an initial press on button 5 ; a
message is displayed to confirm")
151
From the Speed Limit recommendation
and recognition system
F The suggested speed is displayed in the instrument panel.
F
M
ake an initial press on button 5 ; a
message is displayed to confirm the
memorisation request.
F
P
ress button 5 again to save the suggested
speed.
The speed displays immediately in the
instrument panel as the new speed setting.
For more information on the Speed Limit
recognition and recommendation , refer to
the corresponding section.
As a precaution, it is recommended
that you select a cruise speed close to
the current speed of your vehicle, so
as to avoid any sudden acceleration or
deceleration of the vehicle.
The selection also applies to the stopping
distance (versions with EAT8 automatic
gearbox).
Exceeding the programmed
setting
It is possible to exceed the speed setting
temporarily by depressing the accelerator
pedal.
The cruise control no longer manages the
braking system during this period.
Simply release the accelerator pedal to return
to the programmed speed.
If the programmed speed setting is exceeded,
the display of the speed setting disappears
and a message "Cruise control suspended"
is displayed until the accelerator pedal is
released.
Driving situations and
associated alerts
The table below describes the alerts and
messages displayed depending on the driving
situation.
The display of these alerts is not sequential.
With the engine running and with the
thumbwheel at the "
CRUISE" position:
F
P
ress button 6 to display the selection
screen for inter-vehicle distance.
F
B
y pressing button 6 repeatedly, cycle
through the predefined settings.
The selection screen closes after a few
seconds.
The change then takes effect.
This setting remains in memory, whatever the state
of the system and when the ignition is switched off.
Modification of the programmed
inter-vehicle distance
Three threshold settings are suggested for the
inter-vehicle distance:
-
"Distant " (3 dashes),
-
"Normal " (2 dashes),
-
"Close " (1 dash).
6
Driving
Page 154 of 320
 152
Warning/Indicator
lampDisplayAssociated messageComments
(grey) \"Cruise control paused\"
System paused.
No vehicle detected.
(grey) \"Cruise control paused\"
System paused.
A vehicle")
152
Warning/Indicator
lampDisplayAssociated messageComments
(grey) "Cruise control paused"
System paused.
No vehicle detected.
(grey) "Cruise control paused"
System paused.
A vehicle has been detected.
(green) according to the inter-vehicle
distance selected "Cruise control on"
System activated.
No vehicle detected.
(green) according to the inter-vehicle distance selected "Cruise control on"
System activated.
A vehicle has been detected.
or
(green) "Cruise control suspended"
System activated.
The driver has temporarily taken control of the vehicle
by accelerating.
Driving
Page 155 of 320
 153
70
70
Warning/
Indicator lampDisplay
Associated messageComments
(green) +
(orange) \"Take back control of the vehicle\" The driver must take back control of the vehicle
by accelerating o")
153
70
70
Warning/
Indicator lampDisplay
Associated messageComments
(green) +
(orange) "Take back control of the vehicle" The driver must take back control of the vehicle
by accelerating or braking, depending on the
circumstances.
(green) +
(red) "Take back control of the vehicle"
The system cannot manage the critical situation
alone (emergency braking of the target vehicle, rapid
insertion of another vehicle between the two vehicles).
The driver must immediately take back control of
the vehicle.
or
(grey) (orange)
"Activation not possible, conditions
unsuitable"
The system refuses to activate the cruise control.
For more information, refer to Operating limits.
With an automatic gearbox Warning/
Indicator lamp Display
Associated messageComments
or
(grey)/(green) according to the inter-vehicle
distance selected and the actual distance from the target vehicle "Cruise control paused"
(for a few seconds)
The system has brought the vehicle to a complete
stop and is holding it immobilised.
The driver must accelerate to move off again.
The cruise control remains paused until the driver
reactivates it.
6
Driving
Page 157 of 320
 155
The system is not intended for the
following situations:
-
i
f the front end of the vehicle has
been modified (addition of long-range
headlamps, painting of the front
bumper),
-
d
riving")
155
The system is not intended for the
following situations:
-
i
f the front end of the vehicle has
been modified (addition of long-range
headlamps, painting of the front
bumper),
-
d
riving on a racing circuit,
-
r
unning on a rolling road,
-
u
se of snow chains, non-slip covers or
studded tyres.
The use of mats not approved by
CITROËN may inter fere with the operation
of the cruise control.
To avoid any risk of jamming the pedals:
-
e
nsure that the mat is secured
c o r r e c t l y,
-
n
ever place one mat on top of another.
The following situations may interfere with
the operation of the system or prevent it
from working:
-
d
riving on a winding road,
-
p
oor visibility (inadequate street
lighting, falling snow, heavy rain, dense
f o g , e t c .),
-
d
azzle (headlamps of an oncoming
vehicle, low sun, reflections on a damp
road, leaving a tunnel, alternating
shade and light, etc.),
-
c
amera obstructed (mud, frost, snow,
condensation, etc.).
In these situations, detection performance
may be reduced.Malfunction
If the cruise control
malfunctions, dashes are
displayed instead of the
cruise control speed setting.
If this warning lamp comes
on, accompanied by an alert
message and an audible
signal, this confirms a
malfunction.
The adaptive cruise control deactivates
automatically if the use of a "space-saver"
type spare wheel is detected or if there is
a malfunction on the lateral brake lamps or
trailer brake lamps (for approved trailers).
The cruise control operates by day and
night, in fog or moderate rainfall.
However, it is strongly recommended that
you always adapt the speed and the safety
distance in relation to the vehicles ahead,
according to the driving conditions, the
weather and the road surface.
Use the cruise control only where the
driving conditions allow running at a
constant speed and keeping an adequate
safety distance.
Do not activate the cruise control in urban
areas where pedestrians are likely to
cross the road, in heavy traffic (except for
versions with EAT8 gearbox), on winding
or steep roads, on slippery or flooded
roads, when there is snowfall, if the
windscreen is damaged or when the brake
lamps have failed.
In certain circumstances, it may not
be possible for the speed setting to be
maintained or even attained: loaded
vehicle, ascending a steep hill, etc.
Have the system checked by a CITROËN
dealer or a qualified workshop.
Memorising speeds
Linked to the speed limiter and programmable
cruise control only, this function allows speed
limits to be registered which will then be
suggested as settings for these two systems.
6
Driving
Page 158 of 320
 156
As a safety measure, the driver must
only modify the speed settings when
stationary.
\"MEM\" button
For more information on the Speed limiter or
Cruise control , refer to the associated s")
156
As a safety measure, the driver must
only modify the speed settings when
stationary.
"MEM" button
For more information on the Speed limiter or
Cruise control , refer to the associated section.
With this button, you can select a memorised
speed setting to use with the speed limiter or
the programmable cruise control.
Changing a speed setting
From the Driving/Vehicle
menu of
the touch screen, select " Driving
functions " then "Memorised speed
settings ".
Active Safety Brake with
Collision Risk Alert and
Intelligent emergency
braking assistanceThis system is designed to assist the
driver and improve road safety.
It is the driver's responsibility to
continuously monitor the state of the
traffic, observing the driving regulations.
This system does not replace the need for
vigilance on the part of the driver.
This system allows:
-
t
he driver to be warned that their vehicle is
at risk of collision with the vehicle in front,
-
a c
ollision to be prevented, or its severity to
be limited, by reducing the vehicle’s speed.
This system is a driving aid that includes three
functions:
-
C
ollision Risk Alert (alert if there is a risk of
collision),
-
I
ntelligent emergency braking assistance,
-
A
ctive Safety Brake (automatic emergency
b r ak ing).
The vehicle has a camera located at the top of
the windscreen. As soon as the system detects a potential
obstacle, it prepares the braking circuit in
case automatic braking is needed. This
may cause a slight noise and a slight
sensation of deceleration.
You can memorise several speed settings for
each system.
By default, some speed settings are already
memorised.
Deactivation/Activation
By default, the system is automatically
activated at every engine start.
The system can be deactivated or
activated via the vehicle settings
menu.
Deactivation of the system is
signalled by the illumination of this
indicator lamp, accompanied by the
display of a message.
Driving
Page 160 of 320
158
The current threshold can
be modified via the vehicle
configuration menu.
You can select one of three predefined
thresholds:
-
" Distant ",
-
" Normal ",
-
" Close ".
The last threshold selected is kept in memory
when the ignition is switched off.
Operation
Depending on the degree of risk of collision
detected by the system and the alert threshold
chosen by the driver, different levels of
alert can be triggered and displayed in the
instrument panel.
They take account of the vehicle dynamics, the
speed of your vehicle and the one in front, the
environmental conditions, the operation of the
vehicle (cornering, actions on the pedals, etc.)
to trigger the alert at the best moment.
Level 1 (orange) : visual alert only,
signalling to you that the vehicle in
front is very close.
The message " Vehicle close" is
displayed. Where the speed of your vehicle is too
high approaching another vehicle, the first
level of alert may not be displayed: the
level 2 alert may be displayed directly.
Important:
the level 1 alert is never
displayed for a stationary obstacle or
when the " Close" trigger threshold has
been selected.
Intelligent emergency
braking assistance
If the driver brakes, but not sufficiently to avoid
a collision, this system will supplement the
braking, within the limits of the laws of physics.
This assistance will only be provided if you
press the brake pedal. Level 2 (red)
: visual and audible
alert, warning you that a collision is
imminent.
The message " Brake!" is displayed.
Level 3 : finally, in some cases, a
haptic alert in the form of micro-
braking may be given to confirm the
risk of collision.
Operation
The system operates under the following
conditions:
-
T
he vehicle's speed does not exceed 37 mph
(60
km/h) when a pedestrian is detected.
-
T
he vehicle's speed does not exceed 50 mph
(80
km/h) when a stationary vehicle is
detected.
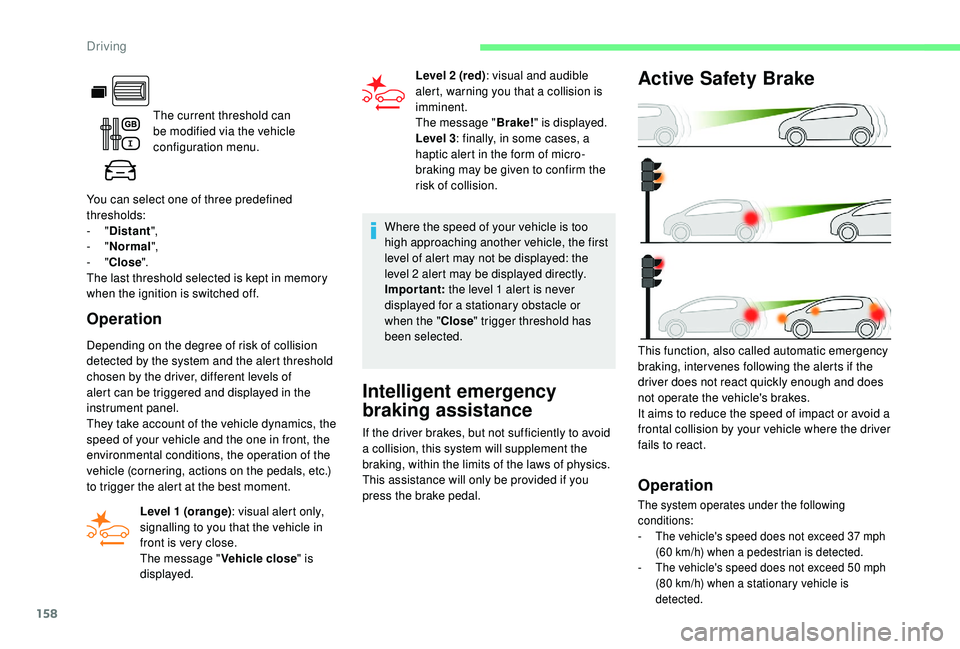
Active Safety Brake
This function, also called automatic emergency
braking, inter venes following the alerts if the
driver does not react quickly enough and does
not operate the vehicle's brakes.
It aims to reduce the speed of impact or avoid a
frontal collision by your vehicle where the driver
fails to react.
Driving
Page 161 of 320
 159
If the camera has confirmed
the presence of a vehicle or a
pedestrian, this warning lamp
flashes (for about 10 seconds) once
the function is acting on the vehicle's
brakes.
With an autom")
159
If the camera has confirmed
the presence of a vehicle or a
pedestrian, this warning lamp
flashes (for about 10 seconds) once
the function is acting on the vehicle's
brakes.
With an automatic gearbox, in the event of
automatic emergency braking until the vehicle
comes to a complete stop, keep the brake
pedal pressed down to prevent the vehicle from
starting off again.
With a manual gearbox, in the event of
automatic emergency braking until the vehicle
comes to a complete stop, the engine may stall.
The driver can maintain control of the
vehicle at any time by sharply turning
the steering wheel and/or pressing the
accelerator pedal.
Operation of the function may be felt by
slight vibration in the brake pedal.
If the vehicle comes to a complete stop,
the automatic braking is maintained for 1
to 2
seconds.
Active Lane Departure
Warning System
Using a camera located at the top of the
windscreen to identify lane markings on the
ground and the edges of the road (depending
on version), the system corrects the trajectory
of the vehicle while alerting the driver if it
detects a risk of involuntarily crossing a line or
roadside (depending on version).
This system is particularly useful on motor ways
and main roads.
Conditions for operation
The speed of the vehicle must be between
40 mph and 112 mph (65 km/h and 180 km/h).
The driver must hold the steering wheel with both
hands.
The change of trajectory must not be
accompanied by operation of the direction
indicators.
The ESC system must be activated and fault-free.
This system is a driving aid that cannot, in
any circumstances, replace the driver’s own
vigilance. The driver must remain in control
of the vehicle under all circumstances.
The system helps the driver only when
there is a risk of the vehicle involuntarily
wandering from the lane it is being driven
in. It does not manage the safe driving
distance, the speed of the vehicle or the
brakes.
The driver must hold the steering wheel
with both hands in a way that allows control
to be maintained in circumstances where
the system is not able to inter vene (if lane
markings disappear, for example).
It is necessary to obser ve the driving
regulations and take a break every two
hours.
Malfunction
In the event of a fault with the system,
you are alerted by the continuous
illumination of this warning lamp,
accompanied by the display of a
message and an audible signal.
If these warning lamps come
on after the engine has been
switched off and restarted, contact
a CITROËN dealer or a qualified
workshop to have the system
checked.
- The vehicle's speed must be between 6 mph
and 53 mph (10 km/h and 85 km/h) when a
moving vehicle is detected.
6
Driving
Page 162 of 320
 160
Operation
Once the system identifies a risk of the vehicle
involuntarily crossing one of the lane markings
detected or a lane limit (e.g. grass border),
it makes the correction to the trajector")
160
Operation
Once the system identifies a risk of the vehicle
involuntarily crossing one of the lane markings
detected or a lane limit (e.g. grass border),
it makes the correction to the trajectory
necessary to return the vehicle to its initial path.
The driver will notice a turning movement of the
steering wheel.This warning lamp flashes during
trajectory correction.
The driver can prevent the correction by
keeping a firm grip on the wheel (during
an avoiding manoeuvre, for example).
The correction is interrupted if the
direction indicators are operated. If the system detects that the driver is not
holding the wheel firmly enough during
an automatic correction of trajectory,
it interrupts the correction. An alert is
triggered to encourage the driver to take
back control of the vehicle.
Deactivation/Activation
The system is reactivated automatically
every time the ignition is switched on.
Driving situations and
associated alerts
The table below describes the alerts and
messages displayed depending on the driving
situation.
The display of these alerts is not sequential.
While the direction indicators are on and for
a few seconds after switching them off, the
system considers that any change of trajectory
is voluntary and no correction is triggered
during this period.
F
P
ress and hold this button to deactivate the
system at any time.
Deactivation is signalled by the
illumination of the warning lamp in
the button and of this warning lamp
in the instrument panel.
Reactivation is achieved by a short press.
Driving